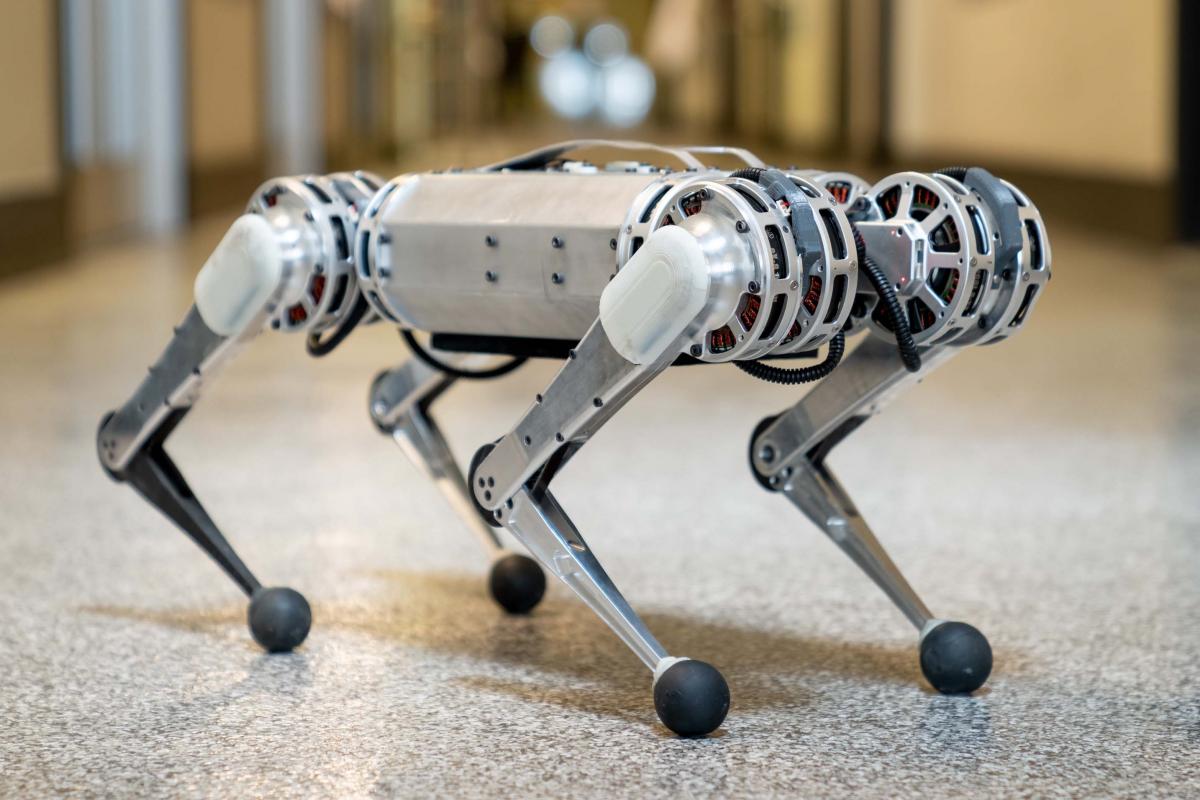
The MIT Mini Cheetah
The MIT Humanoid
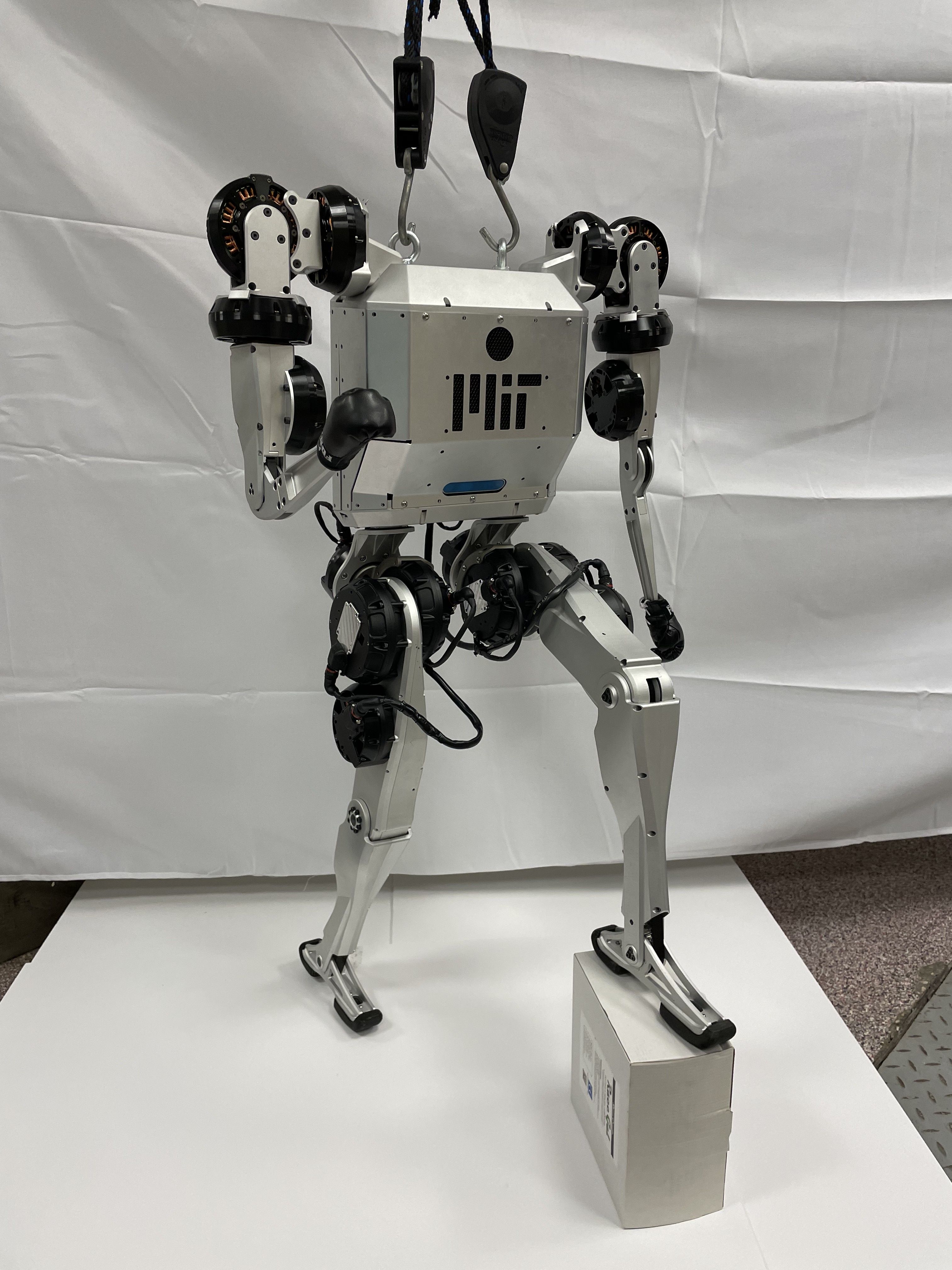
The MIT Humanoid
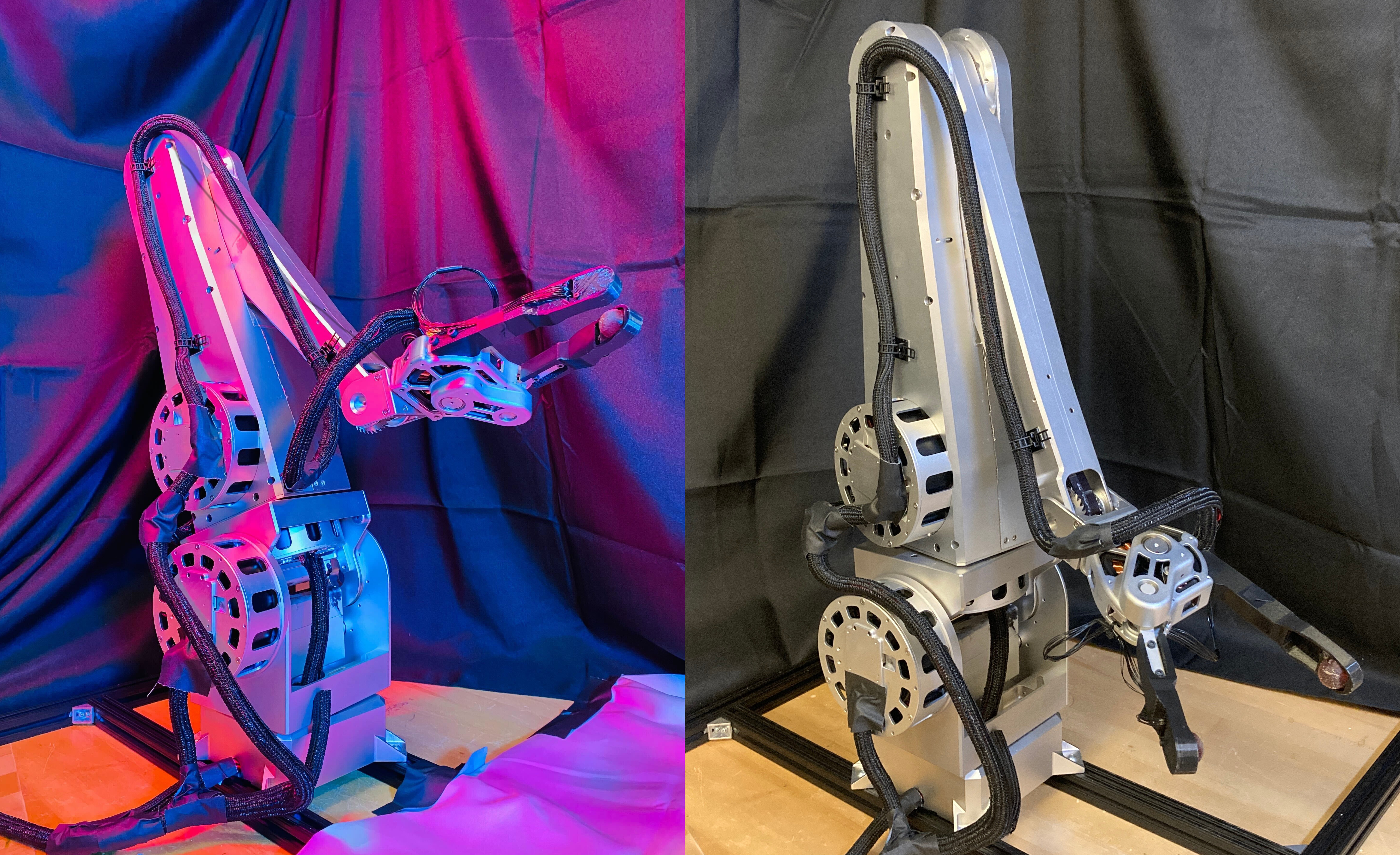
Proprioceptive Manipulation
The MIT Mini Cheetah
The MIT Humanoid
Interested in working with us?
The Biomimetic Robotics Laboratory at MIT focuses on designing and controlling robots using insights taken from the natural world. Many animals have fun and can display incredible feats of speed and agility that are sources of inspiration for the robots designed by the group.
We're always open to new members who will fit in well with the group! We value an open and collaborative atmosphere with no hierarchy, and a hands-on attitude. Our group members come from all engineering fields, are passionate about their work, highly self-motivated, and are able to direct their own curiosity/research. We particularly encourage applications from students with underrepresented backgrounds. If you're interested in working with us, please email 'apply2biomimetics -at- mit.edu' with
- a brief description of what you're interested in working on and why.
- attach your CV and transcript.
- the email subject should indicate the position level (undergrad, grad, postgrad).
- for undergrad and grad level positions, you must be currently enrolled or admitted to MIT.
Learn More