MIT
MECH
E
Biomimetic Robotics Lab
Home
People
Research
Publications
UROP Projects
Research
Running, jumping, turning, flipping: our research is pushing the boundary of what's possible with legged robotics.
Refine Results
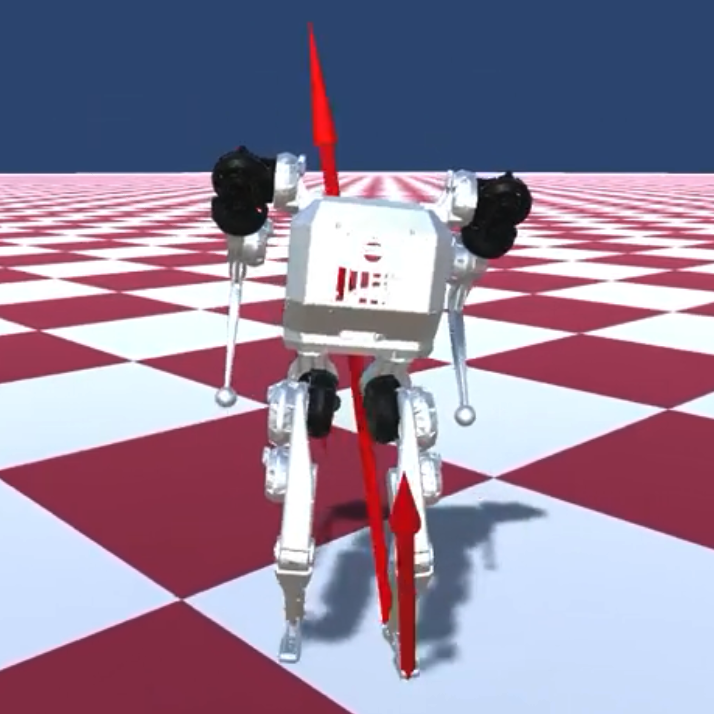
Combining Model-based Control and Reinforcement Learning
Read Article
Reflexive Control for Manipulation
Read Article
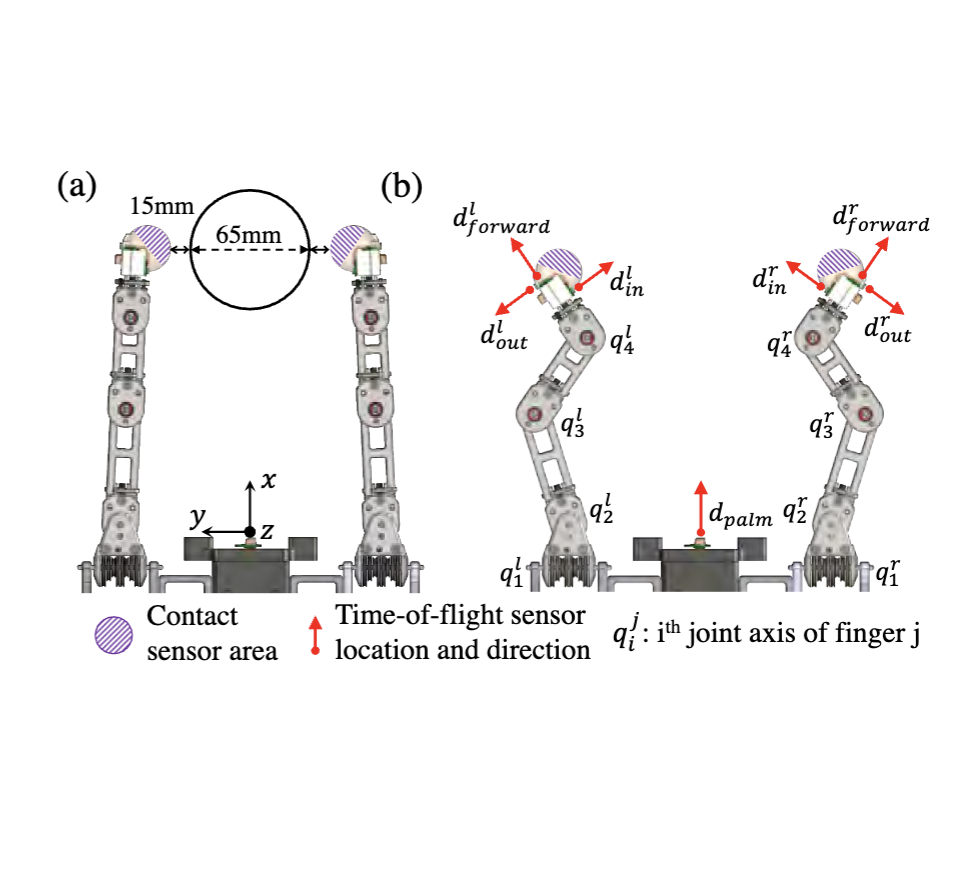
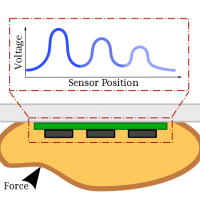
Sensor Design for Manipulation
Read Article
Tailoring Solution Accuracy for Fast Whole-body Model Predictive Control of Legged Robots
Read Article
Design Principles for Multi-Axis, Large Force Magnitude Sensor Arrays for Use in Human and Robotic Applications
Read Article
Optimal Actuator Design
Read Article
Archived Projects
Read Article