Sensor Design for Robotic Manipulation
Overview
To improve dynamic manipulation skills, we are developing low-latency multimodal sensors that use neural networks to estimate contact forces and locations based on signals from barometric pressure sensors. Our original bimodal sensors were designed for footpads for use in locomotion, but in subsequent design iterations we have miniaturized the sensors for use in fingertips. In the most recent design, we added time-of-flight proximity sensors to measure pre-contact distances to the fingertips.
Projects
Design of a Multimodal Fingertip Sensor for Dynamic Manipulation (ICRA 2023)
Abstract:
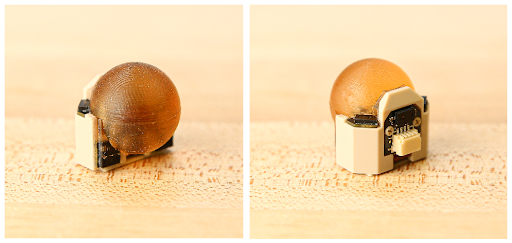
We introduce a spherical fingertip sensor for dynamic manipulation. It is based on barometric pressure and time-of-flight proximity sensors and is low-latency, compact, and physically robust. The sensor uses a trained neural network to estimate the contact location and three-axis contact forces based on data from the pressure sensors, which are embedded within the sensor's sphere of polyurethane rubber. The time-of-flight sensors face in three different outward directions, and an integrated microcontroller samples each of the individual sensors at up to 200 Hz. To quantify the effect of system latency on dynamic manipulation performance, we develop and analyze a metric called the collision impulse ratio and characterize the end-to-end latency of our new sensor. We also present experimental demonstrations with the sensor, including measuring contact transitions, performing coarse mapping, maintaining a contact force with a moving object, and reacting to avoid collisions.
The paper preprint can be found at https://arxiv.org/abs/2209.11368.
Bi-Modal Hemispherical Sensors for Dynamic Locomotion and Manipulation (IROS 2020)
Abstract:
The ability to measure multi-axis contact forces and contact surface normals in real time is critical to allow robots to improve their dexterous manipulation and locomotion abilities. This paper presents a new fingertip sensor for 3-axis contact force and contact location detection, as well as improvements on an existing footpad sensor through use of a new artificial neural network estimator. The fingertip sensor is intended for use in manipulation, while the footpad sensor is intended for high force use in locomotion. Both sensors consist of pressure sensing elements embedded within a rubber hemisphere, and utilize an artificial neural network to estimate the applied forces (f x , f y , and f z ), and contact angles (θ and φ) from the individual sensor element readings. The sensors are inherently robust, and the hemispherical shape allows for easy integration into point feet and fingertips. Both the fingertip and footpad sensors demonstrate the ability to track forces and angles accurately over the surface of the hemisphere (θ=±45° and φ=±45°) and can experience up to 25N and 450N normal force, respectively, without saturating. The performance of the sensor is demonstrated with experimental results of dynamic control of a robotic arm with real-time sensor feedback.
The paper preprint can be accessed at https://ieeexplore.ieee.org/abstract/document/9341543.